

اینورترهای فرکانس یا همان اینورتر کنترل دور موتور القایی که به آنها درایو هم گفته میشود بهعنوان یک “آشنای قدیمی” در زمینه کنترل صنعتی، چندین دهه است که در صنایع مختلف فعال هستند. اینورتر مسئولیت تنظیم سرعت موتور را بر عهده دارد و نقشی ضروری در بهبود فرآیندهای تولید و صرفهجویی در انرژی ایفا میکند. از دیدگاه حرفهای، در واقع نوعی تجهیزات کنترل قدرت است که با استفاده از فناوری فرکانس متغیر و فناوری میکروالکترونیک، با تغییر فرکانس منبع تغذیه موتور AC، سرعت موتور AC را کنترل میکند. با توجه به اهمیت اینورتر فرکانس ( که از این به بعد به اختصار اینورتر گفته میشود )، فرآیند تولد و توسعه آن را در ادامه از جنبه های مختلفی بررسی میکنیم.
پیش زمینه دوران قبل از تولد اینورتر
در تولیدات صنعتی استفاده از موتورها برای کنترل دقیق سرعت و موقعیت اجسام یا اجزاء یک فرآیند ضروری است. بهعنوان مثال:
- تجهیزات بالابر
- تجهیزات بافندگی
- تسمه نقاله مواد
- پیچاندن و باز کردن ( Winding and rewinding)
و انواع دیگر ماشین آلات و تجهیزات.
هنگامی که فناوری کنترل سرعت موتور هنوز به بلوغ امروزی خود نرسیده بود ، افراد فقط می توانستند از برخی روش های مکانیکی برای حل مشکل کنترل حرکت اجسام مانند گیربکس، کلاچ و غیره استفاده کنند که از نظر مکانیکی قابل تنظیم نبودند. در مورد موتور، برای دستیابی به یک سرعت و دور معین ، تعویض گیربکس، تعویض ضریب دنده یا تعویض کلاچ ضروری بود.
این فرآیند نه تنها بسیار وقت گیر بود ، بلکه ضرر زیادی برای دستگاه نیز به همراه داشت.در نوع دیگری از سناریوهای کاربردی کنترل سیال، موتور پروانه را به حرکت درمی آورد و در نتیجه جریان گاز یا مایع یا فشار گاز و فشار مایع هیدرولیک را ایجاد می کرد. در مرحله اولیه، سرعت موتور را نمی شد آزادانه کنترل کرد، کنترل جریان و فشار سیال تنها با باز کردن و بستن شیر در خط لوله امکان پذیر بود، که باعث اتلاف انرژی الکتریکی می شد.
در عصری که اینورتر فرکانس وجود نداشت، به دلیل عدم امکان تنظیم آسان سرعت موتور، جهت دستیابی به سرعتی معین، ماشین سنتی باید لوازم جانبی زیادی را اضافه می کرد، که نه تنها پیچیدگی و هزینه کلی سیستم را افزایش می داد، بلکه محدودیت فضای عملکرد و توسعه دستگاه را نیز در پی داشت . برای حل این مشکلات، معرفی فناوری ساده و کارآمد کنترل سرعت موتور، نقطه داغ و دردسر تحقیقات انتقال صنعتی به شمار می آمد.
معضل تنظیم سرعت موتور
تمرکز اولیه تنظیم سرعت موتور همیشه موتور DC بوده است. یکی از دلایل اصلی این است که کارشناسان و مهندسین برق ابتدا با فناوری یکسوسازی آشنا بودند و ویژگی های مکانیکی موتور DC نیز برای کاربردهای خاص بسیار مناسب بود. ساده ترین راه برای تنظیم ولتاژ آرمیچر استفاده از مقاومت های رشته ای است. هر چه مقاومت بیشتر باشد، افت ولتاژ بیشتر میشود و سرعت موتور DC کندتر میشود.
با این حال، ایرادات موتور DC نیز بسیار مشهود بود. بهعنوان مثال، حلقه کلکتور و برس کربن نیاز به تعمیر و نگهداری منظم دارند، فرآیند تولید موتور DC پیچیده است و هزینه ساخت بالا است. این بدان معناست که موتورهای DC برای طیف وسیعی از کاربردهای موتور مناسب نیستند.
در مقایسه با موتورهای DC، موتورهای AC در ساختار داخلی بسیار ساده تر بوده، بدون کموتاتور و سایر ساختارها اضافی و در عین حال ساخت آنها آسان و پایدار است و برای کاربردهای با سرعت بالا، ولتاژ بالا و جریان بالا مناسب هستند. تنها چیزی که باید حل می شد مشکل کنترل سرعت موتور AC بود.در سال 1888، موتورهای AC معرفی شدند، اما تا مدت ها، موتورهای AC به دلایل ساختاری تنها قادر به کار در یک یا چند سرعت ثابت بودند. همانطور که میدانیم سرعت یک موتور القایی با فرکانس نسبت مستقیم و با تعداد جفت قطب ها نسبت معکوس دارد.
n = 60 f (1 – s ) / p
از فرمول بالا می توان دریافت که نرخ لغزش”s” و جفت قطب “p” پارامترهای مشخصه ذاتی موتور هستند و پس از ساخت موتور نمی توان آن را تغییر داد. اگر بخواهیم سرعت را براحتی تنظیم کنیم، فقط می توانیم فرکانس ورودی منبع تغذیه آن را “f” تغییر دهیم. اساساً هیچ وسیله ای برای تنظیم آزادانه فرکانس ولتاژ شبکه قبل از تولد اینورتر وجود نداشت.
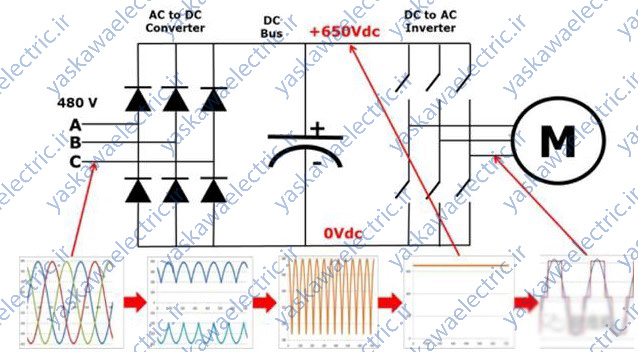 در دهه 1980 با توسعه فناوری نیمه هادی ها، به ویژه ریزپردازنده ها و تریستورها، از ریزپردازنده ها برای کنترل وضعیت هدایت تریستورها استفاده شد. به این ترتیب می توان از ریزپردازنده برای کنترل بسته شدن هدایتی عناصر کلیدزنی (Switching) پل بالا و پایین (در مدار فوق) استفاده کرد و عملیات پیوسته را با توجه به زمان بندی مشخصی انجام داد تا جریان مستقیم به جریان متناوب تبدیل شود. چیزی که ما اغلب آن را فناوری اینورتر می نامیم. در عین حال، ما می توانیم چرخه عملکرد اجزاء قدرت را برای باز و بسته شدن تنظیم کنیم؛ به این معنی که تنظیم فرکانس خروجی اینورتر می تواند محقق شود.
در دهه 1980 با توسعه فناوری نیمه هادی ها، به ویژه ریزپردازنده ها و تریستورها، از ریزپردازنده ها برای کنترل وضعیت هدایت تریستورها استفاده شد. به این ترتیب می توان از ریزپردازنده برای کنترل بسته شدن هدایتی عناصر کلیدزنی (Switching) پل بالا و پایین (در مدار فوق) استفاده کرد و عملیات پیوسته را با توجه به زمان بندی مشخصی انجام داد تا جریان مستقیم به جریان متناوب تبدیل شود. چیزی که ما اغلب آن را فناوری اینورتر می نامیم. در عین حال، ما می توانیم چرخه عملکرد اجزاء قدرت را برای باز و بسته شدن تنظیم کنیم؛ به این معنی که تنظیم فرکانس خروجی اینورتر می تواند محقق شود.
در نهایت، همراه با فناوری یکسوسازی، میتوانیم فرکانس استاندارد شبکه را با توجه به دامنه و فرکانس منبع تغذیه مورد نیاز به سرعت به فرکانس مربوطه تبدیل کنیم و از این طریق فرکانس ورودی موتور را تغییر دهیم تا کنترل تنظیم سرعت موتور القایی صورت پذیرد.پس از یک دوره طولانی توسعه فناوری و تلاش های بی وقفه دانشمندان، اینورتر تغییر و تکامل یافته و به تدریج تبدیل به آنچه امروز می بینیم شده است. برای درک بهتر توسعه اینورتر و سپس توسعه فناوری تبدیل فرکانس، به طور کلی می توان آن را به سه مرحله زیر تقسیم کرد:
تعویض الکترونیک قدرت
با توسعه مداوم قطعات های نیمه هادی، ما از یک دستگاه کاملاً کنترل شده به جای تریستور نیمه کنترل شده (SCR) استفاده می کنیم تا شکل موج خروجی را به شکل موج PWM مدوله شده با عرض پالس تغییر دهیم که تا حد زیادی مولفه های هارمونیک را کاهش داده ، محدوده سرعت موتور آسنکرون را افزایش داده و نوسانات گشتاور را کاهش می دهد.
فرکانس کاری IGBT به طور کلی می تواند بین 10 تا 20 کیلوهرتز برسد. در مقایسه با BJT ترایود BJT، فرکانس کاری یک مرتبه بزرگتر است، به خصوص از نظر برخی از نشانگرهای ولتاژ و جریان، که از BJT فراتر رفته است، مانند تحمل نوسان جریان، قله محدود کننده ولتاژ و غیره. به دلیل استفاده از IGBT می توان فرکانس حامل را افزایش داد و حتی شکل موج PWM مورد نیاز را تشکیل داد که می تواند نویز هارمونیک را تا حد زیادی کاهش دهد. بنابراین، در کاربردهای فعلی اینورتر، IGBT اساساً جایگزین BJT شده است.
IPM ماژول قدرت هوشمند است که از IGBT بهعنوان دستگاه سوئیچینگ استفاده میکند، که نه تنها دستگاه سوئیچینگ قدرت و مدار درایو را یکپارچه میکند بلکه همچنین مدارهای تشخیص عیب مانند اضافه ولتاژ، جریان بیش از حد و گرمای بیش از حد را یکپارچه میکند و می تواند سیگنال های تشخیص را به CPU ارسال کند. حتی اگر اتفاقات نامناسب بار یا استفاده نادرست رخ دهد، میتوان تضمین کرد که IPM بدون آسیب می ماند.
توسعه روش های کنترل
روش کنترل اینورتر که در بالا گقته شد، نسبت ولتاژ ثابت را که کنترل V/f است شامل میشود . V مقدار مؤثر ولتاژ است. تغییر V/f فقط می تواند شار حالت پایدار و گشتاور موتور را تنظیم کند. به منظور بهبود گشتاور در شرایط فرکانس پایین، تقویت گشتاور مورد نیاز است. معمولاً ولتاژ جبران میشود و می توان افت ولتاژ سیم پیچ استاتور را با تغییرات بار جبران کنند.
بعداً برای اینورتر یک روش کنترل جدید – کنترل برداری (Vector Control) – ایجاد شد . اصل اساسی آن ایجاد مدلی معادل موتور DC است و جریان استاتور دستگاه آسنکرون به طور جداگانه به مؤلفه تحریک و مؤلفه گشتاور تجزیه میشود. کنترل بردار تحریک مهم ترین است، بنابراین کنترل بردار را کنترل میدان گرا می نامند و کنترل گشتاور غیر مستقیم است.
نمودار ساختار سیستم کنترل برداری کنترل برداری نیاز به عملیات تبدیل مختصات و نیاز به تشخیص سیگنال سرعت واقعی دارد، بنابراین سنسور سرعت برای بازخورد مورد نیاز است که کنترل برداری حلقه بسته نامیده میشود (closed loop vector control). سپس یک طرح برداری از کنترل بردار بدون سنسور سرعت پیشنهاد شده است که بر اساس ولتاژ فاز و جریان فاز جریان واقعی موتور و پارامترهای سیمپیچ استاتور و روتور و سپس مقادیر مشاهدهای شار روتور محاسبه میشود. و جریان گشتاور محاسبه میشود، در نتیجه کنترل برداری میدان گرا را محقق میکند.
روش دیگری برای توسعه موازی با کنترل برداری، کنترل گشتاور مستقیم (DTC) دایرکت ترک کنترل Direct Torque Control نامیده میشود که بر کنترل مستقیم گشتاور تأکید دارد. این روش بر اساس ولتاژ و جریان اندازه گیری شده موتور برای محاسبه مقدار تخمینی شار و گشتاور موتور است و پس از کنترل گشتاور می توان سرعت موتور را نیز کنترل کرد.
تنوع عملکردی
اینورتر فعلی به یک ریزپردازنده بسیار قدرتمند متکی است که علاوه بر وظایف اصلی تنظیم سرعت تبدیل فرکانس موتور، انواع توابع داخلی نیز پشتیبانی میکند . بهعنوان مثال:
- شتاب و کاهش سرعت خودکار
- اجرای برنامه
- عملیات خودکار صرفهجویی در مصرف انرژی
- خودآموزی پارامترهای موتور
- عملیات کنترل PID
- توابع شبکه و بازخورد (Communication and feedback functions)
آشنایی با بهترین برند اینوتر
پس از آشنایی با اینورتر و تاریخچه آن نوبت به انتخاب برند و نوع اینورتر مورد استفاده براساس کاربرد مورد نظر می رسد. در حال حاضر برندهای مختلف و متفاوتی در ایران و جهان وجود دارد .از برندهای ناشناخته و گمنام گرفته تا برندهای معتبر و معروف مثل اینورتر یاسکاوا که قدمت بعضی از شرکتهای مربوطه به بیش از 100 سال می رسد.
بهعنوان مثال اینورتر یاسکاوا در شرکتی تولید میشود (Yaskawa Electric) که سابقه تاسیس آن به سال 1915 بر میگردد. دامنه تولیدات شرکت یاسکاوا بسیار متنوع بوده و شامل انواع اینورتر و سرو موتور و سرو درایو (سری سیگما 7) به همراه سیستم های کنترل حرکت (Motion Control) می گردد. از جمله مدلهای اینورتر یاسکاوا می توان به موارد زیر اشاره کرد:
- اینورتر J1000 برای کاربردهای ساده که تا توان 4 کیلووات تولید میشود و شامل مدلهای با ورودی تک فاز و سه فاز می باشد.
- اینورتر V1000 برای کاربردهای همه منظوره که تا توان 15 کیلووات تولید می گردد و تا توان 4 کیلوات دارای ورودی تک فاز هم می باشد .
- اینورتر A1000 که یک اینورتر حرفهای سنگین کار است و تا توان 450 کیلووات عرضه می گردد.
- اینورتر یاسکاوا مدل L1000 مخصوص آسانسور می باشد و تا توان 110 کیلو وات تولید می گردد. این نوع اینورتر بهترین اینورتر آسانسوری موجود در دنیا می باشد.
- اینورتر E1000 مخصوص سیستمهای پمپ و فن می باشد و تا توان 350 کیلووات عرضه می گردد.
- اینورتر سری T1000 یاسکاوا هم مناسب استفاده در سیستم های نساجی برای کنترل کشش نخ و الیاف مصنوعی می باشد.
- از دیگر اینورترهای یاسکاوا می توان به مدلهای U1000 و G7 نیز اشاره کرد که کاربردهای خاص خود را دارا می باشد .
- اینورتر های سری GA500 و GA700 یاسکاوا هم از مدلهای جدید درایو یاسکاوا هستند که GA500 نسل جدید سری V1000 و GA700 جایگزین سری A1000 خواهد بود .
برای خرید اینورتر یاسکاوا با نمایندگی یاسکاوا در ایران شرکت کیان کنترل نیک تماس حاصل فرمایید تا ضمن برخورداری از بهترین قیمتهای ممکن از خدمات فنی مناسبی نیز برخوردار باشید . خرید اینورتر یاسکاوا از نمایندگی علاوه بر مزایای فوق اطمینان اصالت کالا را هم در بر دارد ، چون در حال حاضر هستند شرکتهایی که ادعای نمایندگی یاسکاوا را دارند و در عین حال اینوترهای چینی را با قیمتی بیشتر از قیمت سری ژاپنی و انگلیسی عرضه می کنند.
برای کسب اطلاع بیشتر و آشنایی با مشخصات فنی اینورترهای یاسکاوا به سایت نمایندگی یاسکاوا در ایران به نشانی زیر مراجعه فرمایید :

تشکر، آموزنده بود.
با سلام ، کاملترین مقاله در مورد تاریخچه و شکل گیری اینورتر فرکانس برای کنترل دور موتور بود .
از شما و همچنین شرکت کیان کنترل نیک نمایندگی یاسکاوا به جهت درج این مقاله ارزشمند سپاسگزارم.
مهرداد راد